
Holat (geometriya)




Geometriyada, holat vektori yoki radius vektori, koordinata boshi O ga nisbatan fazodagi P nuqtaning oʻrnini ifodalovchi Evklid vektoridir. Odatda x, r yoki s bilan belgilanadi, u O dan P gacha boʻlgan toʻgʻri chiziq segmentiga mos keladi. Boshqacha qilib aytadigan boʻlsak, P nuqtaga koʻchishni[1] koʻrsatadi

„Holat vektori“ atamasi asosan differensial geometriya, mexanika va baʼzan vektor hisob sohalarida qoʻllanadi.
Koʻpincha bu ikki oʻlchovli yoki uch oʻlchovli fazoda qoʻllanadi, ammo Evklid fazosida va har qanday oʻlchamdagi affin fazolari uchun ham osongina umumlashtirilishi mumkin[2].
Nisbiy holat
[tahrir | manbasini tahrirlash]Q nuqtaning P nuqtaga nisbatan nisbiy holati ikkita mutlaq holat vektorini ayirish natijasida hosil boʻlgan Evklid vektoridir (har biri boshlangʻichga nisbatan):

bu yerda .

Ikki nuqta orasidagi nisbiy yoʻnalish ularning birlik vektor sifatida normallashtirilgan nisbiy pozitsiyasidir:

bu yerda maxraj ikki nuqta orasidagi masofa, .

Taʼrif
[tahrir | manbasini tahrirlash]Uch oʻlchov
[tahrir | manbasini tahrirlash]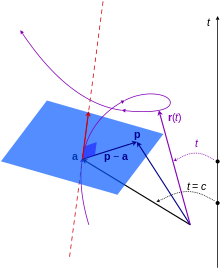
Uch oʻlchovda har qanday uch oʻlchovli koordinatalar toʻplami va ularga mos keladigan asosiy vektorlar fazodagi nuqtaning joylashishini aniqlash uchun ishlatilishi mumkin. Korilayotgan jarayondauchun qaysi biri eng sodda boʻlsa, oʻshani foydalanish mumkin.
Odatda, tanish Dekart koordinata tizimi yoki baʼzan sferik qutb koordinatalari yoki silindrik koordinatalardan foydalaniladi:

Bu yerda t toʻrtburchak yoki aylana simmetriyasidan kelib chiqadigan parametrdir. Bu turli koordinatalar va ularga mos keladigan bazis vektorlari bir xil holat vektorini ifodalaydi. Buning oʻrniga koʻproq umumiy egri chiziqli koordinatalardan foydalanish mumkin.
n oʻlcham
[tahrir | manbasini tahrirlash]Chiziqli algebra n oʻlchovli holat vektorini abstraktsiya qilishga imkon beradi. Holat vektorini bazis vektorlarning chiziqli birikmasi sifatida ifodalash mumkin[3][4]:

Barcha holat vektorlari toʻplami holat fazosini (elementlari pozitsiya vektorlari boʻlgan vektor boʻshligʻi) hosil qiladi, chunki fazoda boshqa holat vektorini olish uchun holat vektorlarni qoʻshish (vektor qoʻshish) va uzunligi boʻyicha masshtablash (skaler koʻpaytirish) mumkin. „Fazo“ tushunchasi intuitivdir, chunki har bir xi (i = 1, 2, …, n) har qanday qiymatga ega boʻlishi mumkin, qiymatlar toʻplami fazodagi nuqtani belgilaydi.
Holat fazosining oʻlchami n (shuningdek, dim(R)=n bilan belgilanadi). r vektorining bazis vektorlariga nisbatan koordinatalari ei xi . Koordinatalar vektori n — toʻplam hosil qiladi (x1, x2, …, xn).
Har bir koordinata xi bir qator parametrlar bilan parametrlangan boʻlishi mumkin. Bitta parametr xi (t) egri 1D yo‘lni tavsiflaydi, ikkita parametr xi (t1, t2) egri 2D sirtni tavsiflaydi, uchta xi (t1, t2, t3) egri 3D hajmini tavsiflaydi.
Qoʻllanilishi
[tahrir | manbasini tahrirlash]Differensial geometriya
[tahrir | manbasini tahrirlash]Holat vektor maydonlari uzluksiz va differensiallanadigan fazoviy egri chiziqlarni tasvirlash uchun ishlatiladi, bu holda mustaqil parametr vaqt boʻlishi shart emas, balki (masalan) egri chiziqning yoy uzunligi boʻlishi mumkin.
Mexanika
[tahrir | manbasini tahrirlash]Har qanday harakat tenglamasida Holat vektori r(t) odatda eng koʻp ishlatiladigan kattalikdir, chunki bu funksiya zarrachaning harakatini (yaʼni nuqta massasi) — uning maʼlum bir vaqtda t vaqtida berilgan koordinata tizimiga nisbatan joylashishini belgilaydi.
Harakatni holat vektori boʻyicha aniqlash uchun har bir koordinatani vaqt boʻyicha parametrlash mumkin.
Bir oʻlchovli fazo misolida, holat faqat bitta komponentga ega, shuning uchun u samarali ravishda skalyar koordinataga tushadi. Bu, aytaylik, x yoʻnalishidagi vektor yoki radial r yoʻnalishi boʻlishi mumkin. Ekvivalent belgilar quyidagilarni oʻz ichiga oladi

Holat vektorining hosilalari
[tahrir | manbasini tahrirlash]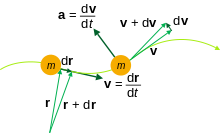
t vaqtning funksiyasi boʻlgan r holat vektori uchun vaqt hosilalari t ga nisbatan hisoblanishi mumkin. Ushbu hosilalar kinematika, boshqaruv nazariyasi, muhandislik va boshqa fanlarni oʻrganishda umumiy foyda keltiradi.
- Tezlik
- Bu yerda d r — cheksiz kichik koʻchish (vektor) .
- Tezlanish
- Siltanish



Holatning birinchi, ikkinchi va uchinchi hosilasi uchun bu nomlar odatda asosiy kinematikada qoʻllanadi[5]. Kengaytirilgan holda, yuqori tartibli hosilalar xuddi shunday tarzda hisoblanishi mumkin. Ushbu yuqori tartibli hosilalarni oʻrganish asl koʻchish funksiyasining yaqinlashuvini yaxshilashi mumkin. Bunday yuqori tartibli atamalar koʻchish funksiyasini cheksiz ketma-ketlikning yigʻindisi sifatida aniq ifodalash uchun talab qilinadi, bu muhandislik va fizikada bir nechta analitik usullarni qoʻllash imkonini beradi.
Yana qarang
[tahrir | manbasini tahrirlash]- Affin fazosi
- Koordinatalar tizimi
- Gorizontal holat
- Chiziq elementi
- Parametrik sirt
- Joylashuvni fiksirlash
- Olti erkinlik darajasi
- Vertikal holat
Manbalar
[tahrir | manbasini tahrirlash]- ↑ The term displacement is mainly used in mechanics, while translation is used in geometry.
- ↑ Keller, F. J, Gettys, W. E. et al. (1993), p 28-29
- ↑ Riley, K. F.. Mathematical methods for physics and engineering. Cambridge University Press, 2010. ISBN 978-0-521-86153-3.
- ↑ Lipschutz, S.. Linear Algebra. McGraw Hill, 2009. ISBN 978-0-07-154352-1.
- ↑ Stewart, James „§2.8. The Derivative As A Function“, . Calculus, 2nd, Brooks/Cole, 2001. ISBN 0-534-37718-1.
Adabiyotlar
[tahrir | manbasini tahrirlash]- Keller, F. J, Gettys, WE va boshqalar. (1993). „Fizika: klassik va zamonaviy“ 2-nashr. McGraw Hill nashriyoti.
Havolalar
[tahrir | manbasini tahrirlash]- Media related to Position (geometry) at Wikimedia Commons